
仿生水下机器人程序
仿生机器人
我们正在开发神经技术基于动物模型的神经生理学和行为。我们开发了两类仿生智能水下机器人(见上图)。第一个是一个8条腿的动态车辆基于龙虾和适用于自治在河流遥感业务和/或沿岸带海底强劲适应不规则的轮廓,当前和激增。第二个工具是一个起伏的系统,是基于七鳃鳗和适用于遥感操作在水柱健壮的深度/高度控制和高机动性。这些工具都是基于一个共同的仿生控制、执行机构和传感器架构,功能高度模块化的组件和低成本每辆车。协同操作,他们可以进行自主调查底部和水体沿岸带或河流。这些系统代表了一类新的智能水下机器人可能在各种栖息地适应业务
![]()
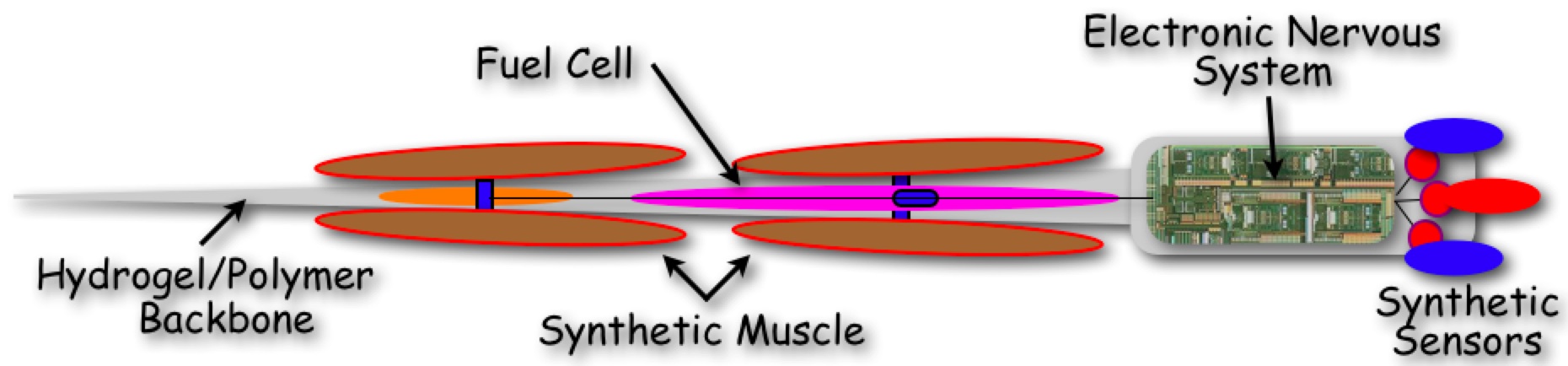
Cyberplasm我们正与调查人员合作加州大学,阿拉巴马大学和纽卡斯尔大学合成生物学原理应用于混合动力微型的集成。本研究的目的是构建Cyberplasm,微机器人集成微电子与细胞传感器和致动器的基因插入和表达。这将是使用细胞的结合来完成设备集成、先进的微电子和生物仿生;一个模仿动物模型的方法;在后者,我们会模仿一些海洋动物的行为八目鳗。合成肌肉会产生波形运动推动机器人在水中。合成来自酵母细胞传感器将信号从眼前的环境报告。这些信号将由电子神经系统处理。反过来,电子大脑会产生信号驱动将使用葡萄糖的肌肉细胞能量。所有电子元件将采用微生物燃料电池集成到机器人的身体。
本研究旨在利用合成生物学在细胞水平上通过集成特定的基因部分
在细菌、酵母和哺乳动物细胞进行设备功能。而且这种方法将使细胞/细菌简化
的输入/输出(I / O)需求的设备集成可以解决。特别是我们计划使用视觉感受器两电子通过光信号感觉和冲动。除了合成生物学将在系统层面上通过连接多个细胞/细菌设备一起连接到电子大脑和实际上创建一个多细胞生物合成微机器人。运动型功能将通过工程肌肉细胞所需的最小的细胞机制激发/收缩耦合和收缩功能。肌肉是由线粒体ATP转化葡萄糖,一个充满活力的货币在生物细胞,因此发电结合驱动。
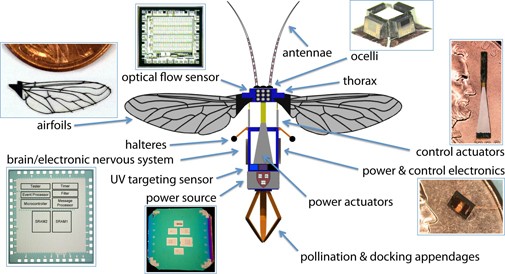
RoboBees
我们与哈佛大学的调查人员合作工程和应用科学学院,生物工程研究所和CentEye开发机器蜜蜂的殖民地。这个项目集方法在身体、大脑和殖民地的水平。灵感来自于一只蜜蜂的生物学、昆虫�年代蜂巢的行为,我们的目标是推动先进的微型机器人和紧凑的设计高能电源;刺激创新带来超低功率计算和电子聪明的 传感器;和完善协调算法来管理多个独立的机器 |
 |
。
电子神经系统我们也在开发基于神经元电路控制器对机器人和neurorehabilitative设备。这些控制器是基于
实验室成员
|
来访的科学家 Al Selverston海洋科学中心
1月知道,海洋教育协会
研究生 本道尔,东北大学raybet雷竞技雷竞技app最新版
安迪,东北大学raybet雷竞技雷竞技app最新版
劳拉·麦格拉思,巴克内尔大学
瑞安·迈尔斯,东北大学raybet雷竞技雷竞技app最新版
林朱,南京大学
实习生 安妮Nunter
约翰•阮
娜塔莉Kukshtel
|
书
脑科学仿生机器人
生物机械论的游泳和飞翔
新闻
Quicktime Ayers机器人实验室的虚拟视图
仿生系统的联机动画
相关链接
相关的出版物
- Ayers, j .和Crisman。j(1992)龙虾作为模型的全向移动机器人控制体系结构。:生物神经网络在无脊椎动物神经行为学和机器人。,r .啤酒。,r . Ritzmann和t·麦肯纳(eds), 287 - 316。
- Ayers, j .(1992)桌面科学运动视频图像分析。先进的成像7:52-55。
- Ayers, j .和Crisman j .(1992)的生物控制全向腿的协调,IEEE Proc.在智能机器人和系统1:574 - 581
- Ayers, J。Crisman, j·d·马萨,d .(1993)一个水下机器人动态的生物性控制器。Proc, Int。电脑。无人潜水器其技术。自治水下系统研究所,新罕布什尔州朴次茅斯60 - 68页
- Ayers, J。卡申,S。Blidberg, d·r·马萨,d .(1994)生物性水下机器人。无人系统12:30-36。。
- Chappell,年代和Ayers, j .(1995)先天和调制自主水下航行器的行为。:Proc, Int。电脑。无人潜水器其技术。自治水下系统研究所,新罕布什尔州朴次茅斯,376 - 387页。
- 官员j .卡申Ayers, j .(1995)生物性起伏的Lamprey-like AUV。:Proc.水雷研讨会)的自动驾驶车辆。海军研究生院。一则页。
- 官员j .卡申Ayers, j .(1995)设计Considerationas和实验生物学上起伏的Lamprey-like AUV。:Proc, Int。电脑。无人潜水器其技术。自治水下系统研究所,新罕布什尔州朴次茅斯,124 - 138页
- Ayers, j .(1995)无功动态操作机器人体系结构在当前和激增。:Proc.水雷研讨会)的自动驾驶车辆。海军研究生院。页。15-31 Breithaupt, t和Ayers, j .(1995)水下生物流场可视化和定量分析使用悬浮粒子。海洋的行为和生理、出版社
- Breithaupt, t和Ayers, j .(1996)的水下生物流场可视化和定量分析使用悬浮粒子。在浮游动物:感官生态学和生理学。p h .楞次d . k . Hartline j·e·珀塞尔和d·l·麦克米伦(eds)。巴塞尔:戈登和违反科学出版商。,117 - 129页
- Breithaupt, T。Ayers, J。(1998) Visualization and quantification of biological flow fields through video-based digital motion-analysis techniques. Mar. Fresh. Behav. Physiol. Vol. 31, pp.55-61.
- Ayers, J, Zavracky, P。McGruer, N。马萨。D。Vorus, W。穆克吉,r·柯里,美国(1998年)仿生自治水下机器人的模块化行为性架构。:Proc.第三国际会议技术和我的问题。海军研究生院。光盘。
- Ayers, j .(1999)仿生水下机器人的基于行为的控制器结构。:Prerational情报:适应性行为和智能系统没有符号和逻辑。卷,即h·克鲁斯,h·里特和j·迪恩(eds) Kluwer专科学校酒吧。多德雷赫特。357 - 370页。
- Ayers, J。,j .情报,c·威尔伯p . Zavracky: McGruer和d·马萨(2000)仿生机器人为浅水水雷。在第四届国际会议的程序技术和矿井问题。16页,CD Rom。
- Ayers, J。有意的,J。McGruer, N。•奥尔科特C。马萨,d .(2000)龙虾机器人。:《国际研讨会Aqua生物机械论。t .吴邦国委员长和N,加藤,(eds)。东海大学。
- Ayers, J。威尔伯,C。•奥尔科特C。(2000) Lamprey Robots. In: Proceedings of the International Symposium on Aqua Biomechanisms. T. Wu and N, Kato, [eds]. Tokai University.
- Ayers, j .(2000)有限状态的行为分析和水下机器人的发展。在人工动物行为学、d . MacFarland和o .荷兰(eds)。在出版社。
- 有意的,J。j . Ayers, et al。(2000)。仿生水下机器人动态的发展:优势匹配的仿生控制体系结构与仿生驱动器。传感器融合和分散控制机器人系统III。G。麦基和p .申克。4196:54 - 61。
- Ayers, j .(2001)一个保守的仿生自治水下机器人控制体系结构。:为仿生机器人,脑科学。j . Ayers j·戴维斯和a·鲁道夫(eds)。麻省理工学院出版社,
- McGruer, N。t . Truong t·巴恩斯,x,和j·Aceros(2001)仿生流和接触/弯曲MEMs传感器。:为仿生机器人,脑科学。j . Ayers j·戴维斯和a·鲁道夫(eds)。麻省理工学院出版社
- 知晓的,j . k . Safak (2001) SMA致动器应用于仿生水下机器人:仿生机器人,脑科学。j . Ayers j·戴维斯和a·鲁道夫(eds)。麻省理工学院出版社。
- 威尔伯,C。曹,w . Vorus y(2001)和美国Currie Lamprey-Based起伏的车辆。:为仿生机器人,脑科学。j . Ayers j·戴维斯和a·鲁道夫(eds)。麻省理工学院出版社。
- Ayers, j ., a . Volkovski n . Rukov a . Selverston & H.D.I. Abarbanel, m . r . 2003构建大脑龙虾机器人使用电子神经元。在国际会议上非线性波物理,页3 Nizhny-Novgorad,俄罗斯。
- Ayers, j . (2004)。结构仿生水下机器人的适应性行为。Bio-mechanisms游泳和飞翔。n .加藤Ayers, J。Morikawa说道,h .东京,出版社:171 - 187。
- 李,y . J。,j·李。Y.B.金正日,j . Ayers a . Volkovskii a . Selverston h . Abarbanel m·拉比诺维奇(2004)。“低功率实时电子神经元VLSI设计通过阈下的技术,”。IEEE Circuits and Systems 4: 744-747.
- Ayers, j .(2004)水下行走。节肢动物结构和开发33,347 - 360。
- Selverston,我。拉比诺维奇,m . I。韦尔塔,R。Novotny, T。利,R。Arshavsky, Y。Volkovskii,。Ayers, J。& Pinto, R. (2005) Biomimetic Central Pattern Generators for Robotics and Prosthetics. In ROBIO2004, IEEE International Conference on Robotics and Biomimetics, 1: 885 - 888. Shenyang, China.
- Ayers, j·戴维斯,j .(2005)仿生机器人. .武器系统技术信息分析中心通讯5 (4):1 - 4。
- Ayers, j·戴维斯,j .(2005)龙虾机器人。武器系统技术信息分析中心通讯6 (1):1 - 5
- Ayers, J。:Rulkov, et al。(2006)。爆炸Neurorehabilitation电子神经元:从仿生机器人。Proc。第七届国际会议上技术和矿山问题,蒙特利,CA。
- Selverston, a & Ayers, j .(2006)在小神经回路振荡,振荡行为。554年生物控制论95:537�
- Ayers, j .和知晓的,j .(2007)仿生水下行走机器的控制方法。英国皇家学会哲学学报,365,273�295
- 李,Y . .李,Y.B. j . KimAyers, J。(2005). Low power CMOS adaptive electronic central pattern generator design. IEEE Circuits and Systems 2: 1350-1353
- j·李,y . j . Lee k金,y . b . Kim和j·艾尔斯(2007)“低功耗CMOS自适应电子中枢模式发生器设计的仿生机器人,“Neurocomputing 71: 284 - 296。
- Ayers, j . n . Rulkov (2007)。用电子控制仿生水下机器人的神经系统。:Bio-mechanisms动物游泳和飞翔。加藤n和s Kamimura。东京,气象出版社。295 - 306页。
- Ayers, J。Rulkov, N。克努森,D。金正日得到。,a . Selverston Volkovskii a (2010)。“用电子神经系统控制水下机器人”。Applied Bionics and Biomechanics 7: 57-67.
- 》、d和j·艾尔斯(2010)守恒的网络控制节肢动物感受外界刺激的光流在运动反应。课堂讲稿的人工智能,6226:72 - 81
- 胡,J。,YB。金,j·艾尔斯(2010)低功率100�CMOS前端生物传感IEEE电路和系统的互阻抗放大器。53:541 - 544
- 韦氏比重,。Rulkov, N。Ayers, J。布雷迪,D。&亨特,m . 2011。控制lamprey-based机器人电子神经系统。智能结构和系统。7 (6):471 - 484
- .Ayers J韦氏比重,A &》, d .(2011)流动的守恒的神经对架构和起伏的仿生机器人。海洋技术协会杂志45 (4):147 - 152。
支持的
 (去年改变了9/20/2010页) (去年改变了9/20/2010页) |
 |










 (去年改变了9/20/2010页)
(去年改变了9/20/2010页)